綠色未來 | 偉創(chuàng)全自動垃圾吊系統(tǒng),現(xiàn)代城市垃圾清運的數(shù)智新選擇------泰州偉創(chuàng)電氣代理商
2025-02-10
隨著全球城市化進程的加速,城市垃圾處理和環(huán)境管理面臨著前所未有的壓力。傳統(tǒng)的垃圾清運方式在效率、環(huán)保和安全等方面的不足,已難以滿足日益增長的城市垃圾處理需求。如何提高垃圾清運效率、減少人力成本、同時保障環(huán)境和作業(yè)人員的安全,成為當下亟待解決的關鍵問題。偉創(chuàng)電氣憑借在自動化領域的技術積累及全產(chǎn)品線優(yōu)勢,打造全自動垃圾吊系統(tǒng),破解行業(yè)難題。方案通過高度自動化的系統(tǒng)設計,兼顧手動、遠程控制和自動控制三種操作模式,打破了傳統(tǒng)垃圾吊作業(yè)的瓶頸,降低了人工操作的安全風險,讓城市環(huán)境管理和垃圾處理更高效、更智能、更安全。方案成功應用于某市垃圾處理廠,并成為該市的首個全自動垃圾吊項目,賦能智能垃圾清運系統(tǒng)在城市環(huán)保領域的全面升級。

偉創(chuàng)全自動垃圾吊系統(tǒng)
打造智慧大腦,讓運行更高效
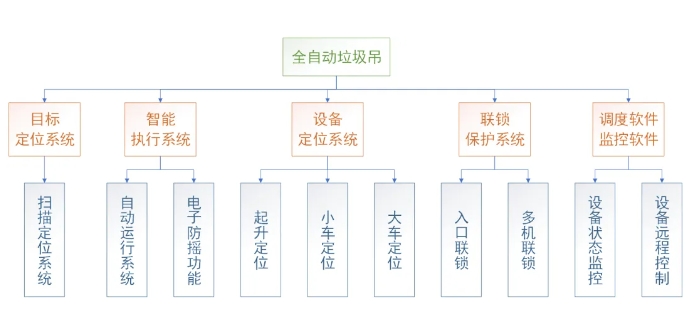
偉創(chuàng)全自動垃圾吊系統(tǒng),利用激光定位、高精度傳感器、防搖控制算法等技術,由定位系統(tǒng)、執(zhí)行系統(tǒng)、保護系統(tǒng)、監(jiān)控軟件等多個子系統(tǒng)組成,有效解決控制效率和安全性的問題,實現(xiàn)垃圾吊的全自動化高效運行。
系統(tǒng)集成優(yōu)勢
多重技術匯集,助力環(huán)保提速
1多種控制模式,靈活應對不同需求
系統(tǒng)設計全面考慮了不同操作環(huán)境和需求,支持手動運行、遠程控制、自動控制三種控制模式,操作靈活、簡便。操作人員可根據(jù)現(xiàn)場實際情況選擇合適的控制方式,不僅提高了系統(tǒng)適應性,也大大增強了應急情況下的操作效率。
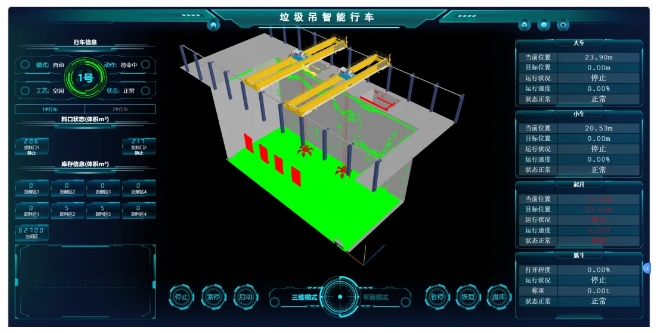
2數(shù)智化加持,智能調(diào)控高效協(xié)同
為了確保垃圾吊在復雜環(huán)境下的精確定位和高效作業(yè),系統(tǒng)配置了多個激光掃描平臺,實現(xiàn)全工作區(qū)域的實時數(shù)字建模。通過激光掃描技術,系統(tǒng)能夠精準獲取目標位置,自動判斷并執(zhí)行相關動作。同時,結合數(shù)字孿生技術,系統(tǒng)能夠創(chuàng)建虛擬的垃圾吊作業(yè)環(huán)境模型,并與實際環(huán)境實時對接。通過數(shù)字孿生的反饋與預測功能,系統(tǒng)可以更高效地模擬和優(yōu)化作業(yè)路徑,提前識別潛在問題,從而提高作業(yè)效率和精度。無論是狹窄空間還是復雜環(huán)境,設備都能夠高效、精確地完成任務,顯著提升垃圾清運的作業(yè)精度與可靠性。
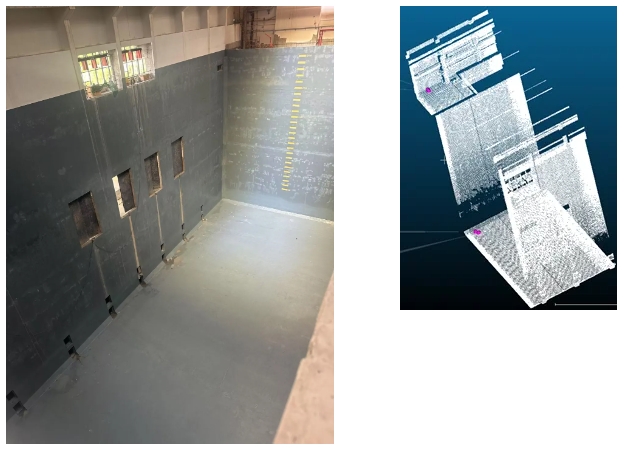
▲ 實景&數(shù)字模型
3高精度傳感器,實力穩(wěn)控系統(tǒng)運行
系統(tǒng)采用了先進的高精度激光傳感器和光式編碼器,能夠在惡劣環(huán)境下依然確保重要參數(shù)的準確可靠。無論是在高溫、潮濕或是惡劣的工作條件下,傳感器和編碼器依舊表現(xiàn)出色,確保系統(tǒng)始終處于最佳工作狀態(tài),為設備的穩(wěn)定性和安全性提供了強有力的保障。
4自動防搖算法,安全保障抓取作業(yè)
為應對垃圾吊在不同高度下吊具可能出現(xiàn)的擺動問題,系統(tǒng)內(nèi)置了偉創(chuàng)自主開發(fā)的自動防搖算法。算法能夠有效抑制抓斗擺動,確保設備在任何高度下運行時都能保持在安全范圍內(nèi)。通過自動防搖技術,極大地提高了設備的穩(wěn)定性,減少了因擺動帶來的安全隱患,為操作人員提供了更高的安全保障。
5多重安全防護,確保設備運行安全
系統(tǒng)特別針對多機聯(lián)動及交叉作業(yè)情況配置了多重安全保護機制。在軟件調(diào)度層、自動執(zhí)行層、單機控制層等多個環(huán)節(jié)設計了冗余措施,確保設備在復雜工況下仍能穩(wěn)定運行。此外,通過軟硬件安全保護的多重設計,能夠在系統(tǒng)出現(xiàn)故障時自動切換到備用方案,進一步保障了設備的安全性和可靠性。
全自動垃圾吊項目的成功實施,標志著偉創(chuàng)在智能垃圾清運領域已處于先進地位。未來,偉創(chuàng)電氣將繼續(xù)聚焦工業(yè)領域的自動化、智能化、數(shù)字化,通過持續(xù)的創(chuàng)新和優(yōu)化,為行業(yè)的數(shù)智化轉型貢獻更多自主力量。